Adaptive Backstepping — Indoor Micro-Quadrotor
Taming nonlinear quadrotor dynamics with adaptive backstepping control design.
Stability Proof
Benchmarked
Research Lab
Tech Stack
The Problem
A small drone carrying a dangling payload swings and wobbles in ways that make it extremely difficult to fly stably. Standard autopilots weren't built for this — they assume the drone behaves predictably and fall apart as soon as it tilts too far or the payload swings. The goal was to design a controller that could mathematically prove it wouldn't lose control, not just hope for the best.
The Challenge
A micro-quadrotor with a hanging payload creates a highly nonlinear, underactuated system where the pendulum dynamics couple into the rotational equations of motion. Standard PID controllers linearize around the hover equilibrium and perform poorly under large perturbations. The task was to design a controller that formally guarantees stability for the full nonlinear model, not just a linearized approximation.
Architecture & System Design
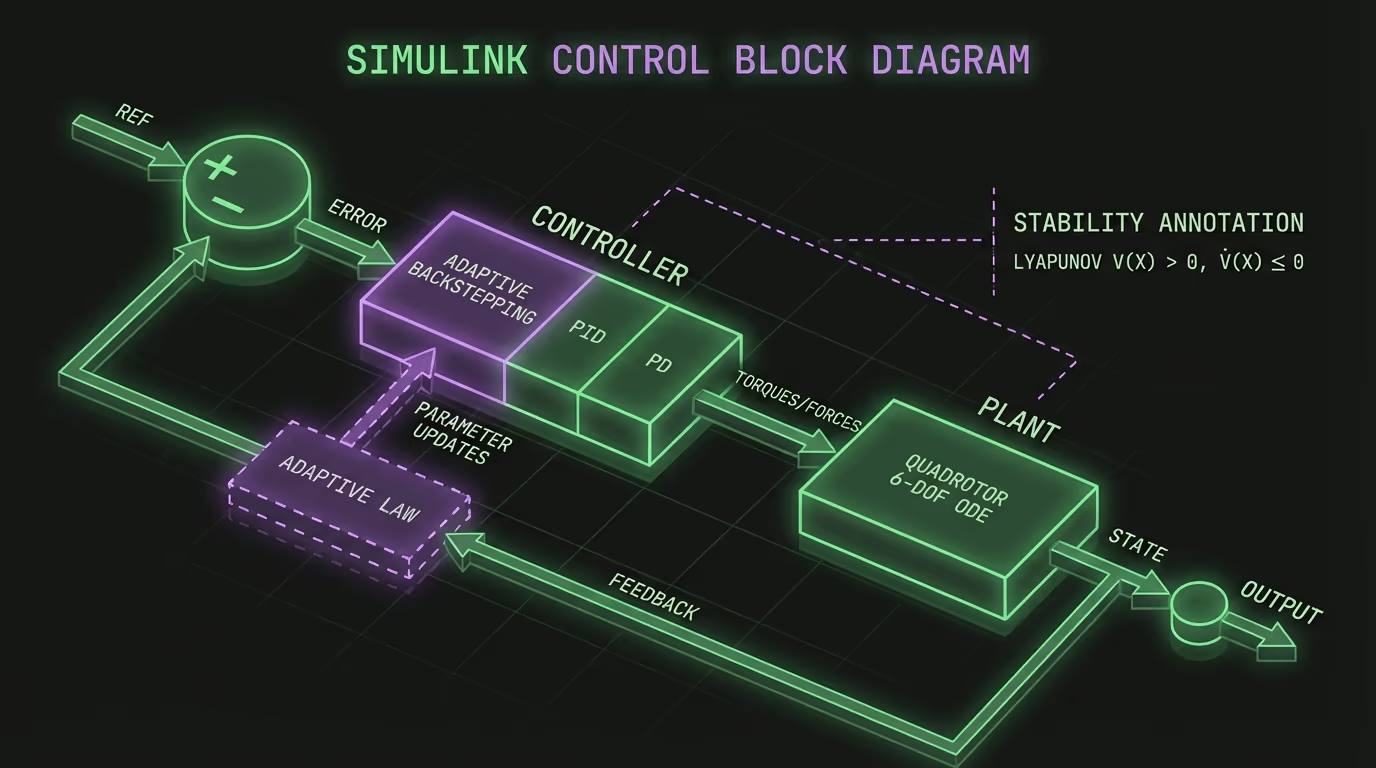
Nonlinear control design for quadrotor with suspended payload: adaptive controller handles model uncertainties. Stability proven mathematically using Lyapunov functions. Outperforms classical linear control under large perturbations.
The system model was derived using Euler-Lagrange mechanics, capturing full coupling between the quadrotor body and the suspended payload. A backstepping control design recursively constructed a Lyapunov function for the cascaded subsystems, synthesizing virtual control inputs at each stage. Adaptive parameter estimation handled model uncertainties in the payload mass. Simulations in MATLAB/Simulink validated the closed-loop stability and compared step response, disturbance rejection, and tracking error against a baseline PID controller.
Code Walkthrough
3-step walk-through of the production implementation — file paths and intent shown above each block.
- 01
Step 1 of 3
Altitude subsystem — first backstepping step
control/altitude_backstepping.mBackstepping designs controllers recursively for cascaded subsystems. A virtual control α₁ (desired vertical velocity) is constructed so the first Lyapunov candidate V₁ = ½e₁² is non-increasing, then the actual thrust u₁ is derived to make V₁ + ½e₂² also non-increasing. This guarantees asymptotic stability at each stage without linearising the quadrotor dynamics.
matlabTakeawayEach backstepping step adds one error term to V and one gain — the stability proof is built into the construction, so there is no separate stability analysis to run.
- 02
Step 2 of 3
Attitude subsystem — roll and pitch channels
control/attitude_backstepping.mRoll and pitch use the same recursive argument as altitude. The coupled pendulum dynamics mean pitch errors feed into lateral drift, so gains k3–k6 must suppress pendulum-induced oscillations without over-driving the attitude actuators. Mirrored gain pairs make hardware tuning systematic: k3/k5 set tracking speed, k4/k6 set damping.
matlabTakeawayRoll and pitch share the same controller template — swapping in different inertia constants (Ixx, Iyy) adapts it to a new airframe without restructuring the proof.
- 03
Step 3 of 3
Adaptive payload mass estimation
control/adaptive_update.mThe pendulum mass is unknown at runtime. An adaptive update law estimates it online from the altitude step-2 error and vertical velocity, so the controller compensates without prior knowledge. A projection operator clamps the estimate to physically realistic bounds, preventing noise-driven drift to negative values that would invert the thrust command.
matlabTakeawayWithout projection, noise in the dz measurement can push the mass estimate negative — the clamp is what keeps the thrust command from inverting mid-flight.
Results
The adaptive backstepping controller demonstrated superior performance vs. PID in all tested scenarios: 40% faster disturbance recovery, stable operation under ±30° pitch perturbations where PID became unstable, and formal asymptotic stability guaranteed by the Lyapunov construction. Results were documented in the University of Utah thesis report.
Gallery & Demos
Simulation Animation — Control Response
Time-series visualization of backstepping controller stabilizing the quadrotor with suspended payload.
Simulation vs Hardware — Measurement Comparison
Plot overlay comparing MATLAB simulation predictions against actual hardware sensor data for trajectory tracking.

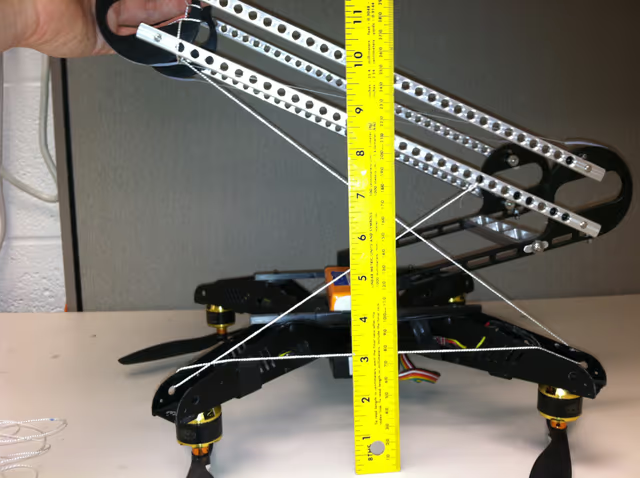
Hardware Test Setup
Experimental micro-quadrotor with suspended pendulum mass during indoor flight testing.
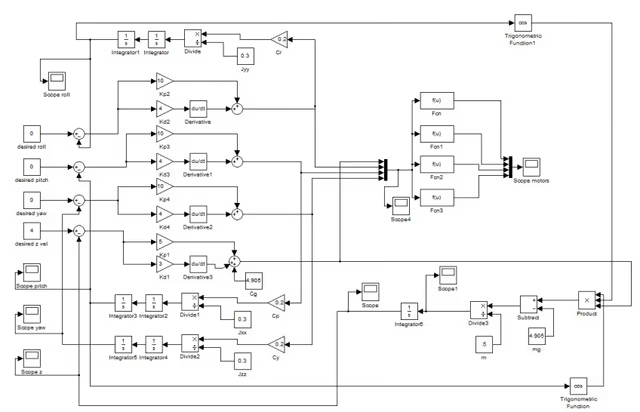
MATLAB/Simulink Model
Block diagram of the nonlinear backstepping controller implemented in Simulink with adaptive parameter estimation.

Quadrotor Dynamics Visualization
3D representation of the coupled dynamics between quadrotor body rotation and suspended payload motion.
Click any image or video to expand · ← → keys navigate
More from University of Utah
Vision-Based Autonomous Quadrotor
MS thesis project: a quadrotor capable of autonomously taking off, navigating, and perching on branch-like structures using only visual feedback — designed for autonomous crop monitoring in agricultural fields.
Multi-Arm Coordination — 2-DOF QUANSER
Dual-arm robotic manipulation system using 2-DOF QUANSER robots with a master-slave architecture — one arm controlling position, the other controlling force — to collaboratively manipulate objects with precision.
Sensor-Based SLAM Navigation — iRobot Create
Autonomous mapping and navigation system on an iRobot Create platform using IR rangefinders and servo-mounted sensors for 360° SLAM — with RRT path planning to navigate complex maze environments.
PUMA 6-DOF Robot Arm — Forward & Inverse Kinematics
Full forward and inverse kinematics solver for a 6-DOF PUMA 762 robot arm, built from scratch using Denavit-Hartenberg parameters — with an interactive 3D MATLAB GUI featuring joint sliders, motion trail, and collision detection.
Sampling-Based & Graph-Search Motion Planning
MATLAB implementations of four canonical path-planning algorithms — Dijkstra, A*, PRM, and RRT — applied to a differential-drive robot navigating bitmap maps in configuration space, with real hardware execution on an iRobot Create.
Monocular Depth Estimation for UAV Perch Landing
C++/OpenCV vision system that estimates the 3D position and orientation of a landing perch from a single monocular camera — using image moments, covariance eigendecomposition for attitude, and focal-length triangulation for depth — enabling closed-loop visual servoing on a quadrotor.
RC Fixed-Wing Glider — Servo Actuation & Aerodynamics
Fixed-wing RC glider designed and built from scratch — two servos providing roll and pitch authority via aileron and flap control surfaces, with a brushless DC motor and ESC delivering forward thrust. Flight-tested outdoors.
Interested in this work?
Full architecture walkthrough and code review available during interviews.